PyFlow
To simplify testing and usage of the ROS package, it is possible to use PyFlow. PyFlow is a visual scripting framework for python. A fork of the original repository is automatically installed in the docker image.
Start PyFlow
To use PyFlow, simply launch the application inside the docker container using:
pyflow
This should open the PyFlow application as shown in this image:
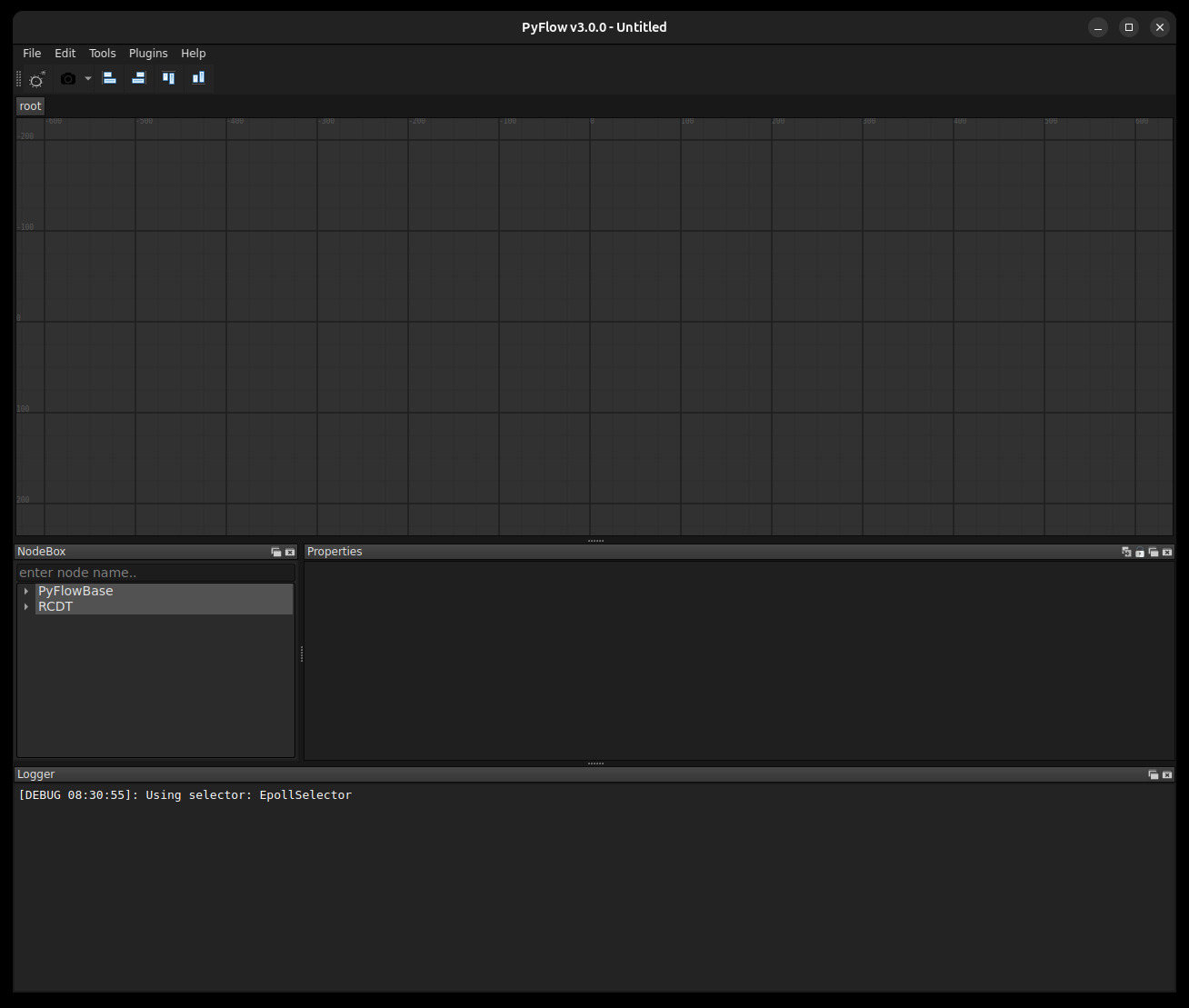
Some default settings are already configured for you, but you can always change them under Edit -> Preferences. By default, the Additional package locations is set to /home/rcdt/rcdt_robotics/pyflow/packages, so that PyFlow can find our packages.
Note
If you change preference, you need to SaveAndClose and restart PyFlow to apply the changes.
By default, 3 panels are loaded: NodeBox, Properties and Logger. Panels can be added under Tools -> PyFlowBase. For more information about PyFlow itself, please have a look at the README in the fork.
Create a graph
To create a graph, you can select nodes from the NodeBox and place them on the grid. Nodes under PyFlowBase are default nodes that come with PyFlow. Nodes under RCDT are nodes provides by us. These nodes are mainly ROS service clients and can communicate with active ROS services.
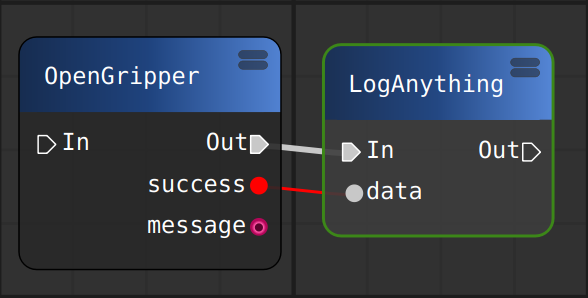
As an example, you could add the OpenGripper and LogAnything nodes. An Out pin one one node can be connected to an In pin on a second node. Data pins can only be connected if they have the same type. The data pin of the LogAnything node is an exception, as this pin can be connected to any data pin. Connecting the two nodes give you this simple graph:
Note
You can also save and load graphs. Graphs saved to the repository can be found under rcdt_robotics/pyflow/graphs.
Execute a graph
You can execute a graph by selecting the first node in a sequence. This opens the properties of the selected node in the Properties panel:
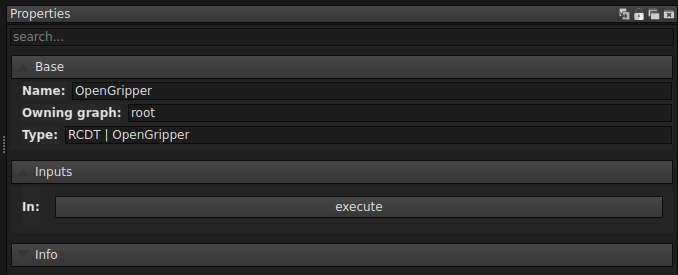
You can now execute this node by pressing the Execute button. If the execution is successful, the next node in the sequence is also executed. Data is automatically passed when data pins are connected. Logs are shown in the Logger panel.
If you execute the graph shown above without launching ROS, the Logger panel shows that the service is not available and the execution of the sequence fails. If you start ROS and Franka with gripper, executing the sequence should be successful. The gripper should open and True should be logged by the LogAnything node, since success of the OpenGripper node now has the value True.
Add other services
You can see all the available services under the RCDT group in the NodeBox panel. These services are defined in rcdt_robotics/pyflow/packages/RCDT/services.py. If you create a new service, you can add a PyFlow client node by adding the service to this file. After restarting PyFlow, this new node should be available.
Checklist for creating a service in pyflow
add the service under a relevant group in
rcdt_robotics/pyflow/packages/RCDT/services.py. This ensures the service shows up in pyflow.
# example entry:
add("YourService","/your_service", srv.YourService, group)
add an srv file in
rcdt_messages/srv/YourService.srv, making sure the filename is identical to the third entry in the add() function above. This defines the input and output ports on your node. Make sure to follow the convention that all these services at least return a bool success.Write the actual node implementation. Extend rclpy.node.Node, and call
self.create_service(srv, "/your_service",self.callback)in the __init__./your_serviceshould be identical to the entry in the first step, while thecallback()function will contain the actual code that gets run in the pyflow node. For some examples, checkrcdt_detection/src_py.